Next: 3. TEORIA QUALITATIVA Up: 2. SISTEMI LINEARI Previous: 2.4 AUTOVALORI COMPLESSI Indice Indice analitico
Sommario Se una matrice non è diagonalizzabile (e neppure
semisemplice), essa differisce da una diagonalizzabile (o
semisemplice) per una matrice che elevata a una qualche potenza dà
la matrice zero. L'esponenziale di matrice può anche in questo
caso essere espressa mediante funzioni analitiche elementari, tra
cui appariranno, accanto ad esponenziali, seni e coseni,
anche dei polinomi.
Poiché le matrici con autovalori semplici sono semisemplici, cerchiamo un esempio di matrice non semisemplice all'estremo opposto, supponendo cioè che ci sia un solo autovalore di molteplicità massima, pari alla dimensione dello spazio.
Sia ![]() una matrice
una matrice ![]() con il solo autovalore
con il solo autovalore
![]() .
Allora la matrice
.
Allora la matrice
Consideriamo la trasformazione di ![]() in sé associata ad
in sé associata ad ![]() :
poiché non è un isomorfismo, l'immagine non è tutto
:
poiché non è un isomorfismo, l'immagine non è tutto ![]() ,
quindi
,
quindi
![]() . Ora applichiamo ancora
. Ora applichiamo ancora ![]() ad
ad ![]() :
poiché anche la restrizione di
:
poiché anche la restrizione di ![]() a questo sottospazio non ha
altri autovalori che lo
a questo sottospazio non ha
altri autovalori che lo ![]() , anche la restrizione non sarà un
isomorfismo, e quindi
, anche la restrizione non sarà un
isomorfismo, e quindi
![]() avrà una dimensione ancora
più bassa:
avrà una dimensione ancora
più bassa:
Definizione:
Il minimo numero ![]() per cui ciò accade si dice
ordine del nilpotente;
per quanto visto sopra, l'ordine non può superare la
dimensione dello spazio ambiente:
per cui ciò accade si dice
ordine del nilpotente;
per quanto visto sopra, l'ordine non può superare la
dimensione dello spazio ambiente: ![]() .
.
L'unico autovalore di un nilpotente è lo ![]() : se così non fosse,
: se così non fosse,
![]() con
con
![]() implicherebbe
implicherebbe
![]() .
.
Viceversa, una matrice il cui unico autovalore è ![]() è
nilpotente.
è
nilpotente.
Nel caso di una matrice ![]() con un solo autovalore
con un solo autovalore
![]() , la si può decomporre nella somma di una matrice
diagonale e di un nilpotente:
, la si può decomporre nella somma di una matrice
diagonale e di un nilpotente:

Vogliamo cambiare base in modo da rendere la forma della matrice ![]() più semplice possibile. Prendiamo come primo vettore della nuova
base un vettore
più semplice possibile. Prendiamo come primo vettore della nuova
base un vettore ![]() tale che
tale che
![]() (esiste,
altrimenti
(esiste,
altrimenti ![]() è la matrice zero), e come secondo vettore della base
è la matrice zero), e come secondo vettore della base
![]() . Se
. Se
![]() allora la sottomatrice
allora la sottomatrice
![]()
![]() che esprime la trasformazione del sottospazio generato
da
che esprime la trasformazione del sottospazio generato
da ![]() è della forma:
è della forma:
![\begin{displaymath}
\left\{\begin{array}{lcl}
{\displaystyle N\,V_1} & {\disp...
...=\left[\begin{array}{cc}{0}&{0}\\
{1}&{0}\end{array}\right]
\end{displaymath}](img527.png)
![\begin{displaymath}
Q=\left[\begin{array}{ccc}
0 & 0 & 0\\ 1 & 0 & 0\\ 0 & 1 & 0
\end{array}\right]
\end{displaymath}](img534.png)
Questo ragionamento viene utilizzato nella dimostrazione
del teorema della forma canonica dei nilpotenti come passo
di induzione. È un procedimento costruttivo, che fornisce
esplicitamente la nuova base ![]() e quindi la matrice
e quindi la matrice ![]() del cambiamento di coordinate lineare che riduce a forma canonica.
del cambiamento di coordinate lineare che riduce a forma canonica.
In generale una matrice nilpotente ![]() di tipo
di tipo ![]() si può
ridurre, con un cambiamento di coordinate lineare
si può
ridurre, con un cambiamento di coordinate lineare ![]() ,
nella forma descritta dal teorema della
forma canonica dei nilpotenti, cioè come matrice
diagonale a blocchi
,
nella forma descritta dal teorema della
forma canonica dei nilpotenti, cioè come matrice
diagonale a blocchi
Esercizio
Per la matrice nilpotente ![]() definita sopra, calcolare
definita sopra, calcolare
![]() .
.
Suggerimento: ![]() ha diversi da zero solo i coefficienti
di posto
ha diversi da zero solo i coefficienti
di posto ![]() , se esistono....
, se esistono....
Se la matrice ![]() ha un solo autovalore reale
ha un solo autovalore reale ![]() , è
della forma
, è
della forma
![]() ; il cambiamento di coordinate lineare
che riduce il nilpotente
; il cambiamento di coordinate lineare
che riduce il nilpotente ![]() alla forma canonica non cambia
alla forma canonica non cambia
![]() (che commuta con ogni matrice
(che commuta con ogni matrice ![]() ), quindi riduce
), quindi riduce ![]() alla sua forma canonica di Jordan dove ciascun
blocco di Jordan
alla sua forma canonica di Jordan dove ciascun
blocco di Jordan ![]() lungo la diagonale principale:
lungo la diagonale principale:
Esercizio
Determinare le orbite del sistema dinamico
![\begin{displaymath}
\dot X=AX\;,\;
A=\left[\begin{array}{cc}{-1}&{4}\\
{-1}&{-5}\end{array}\right] \ .
\end{displaymath}](img551.png)
Consideriamo il caso di dimensione ![]() ed una matrice
ed una matrice ![]() con un
solo autovalore reale
con un
solo autovalore reale ![]() di molteplicità algebrica
di molteplicità algebrica ![]() :
:
Poiché ![]() è nilpotente, la sua esponenziale si riduce ad un
polinomio di grado
è nilpotente, la sua esponenziale si riduce ad un
polinomio di grado ![]() , in questo caso di grado 1:
, in questo caso di grado 1:
Quindi per il sistema dinamico lineare:
![]() con condizione iniziale
con condizione iniziale
![]() il flusso integrale
il flusso integrale
Come visto nello sottosezione precedente, cambiando riferimento
(cioè con un coniugio), ![]() può essere messo nella forma
canonica con un solo coefficiente diverso da zero sotto la diagonale.
Poiché il cambiamento di riferimento non cambia la matrice
può essere messo nella forma
canonica con un solo coefficiente diverso da zero sotto la diagonale.
Poiché il cambiamento di riferimento non cambia la matrice
![]() , nel nuovo riferimento la stessa applicazione è
espressa dalla matrice
, nel nuovo riferimento la stessa applicazione è
espressa dalla matrice
![]() della forma
della forma
![\begin{displaymath}
Q=\lambda\, I+ \left[\begin{array}{cc}{0}&{0}\\
{1}&{0}\end{array}\right]
\end{displaymath}](img558.png)
![\begin{displaymath}
\exp(Q\,t)=\exp\,\left[\begin{array}{cc}{\lambda\,t}&{0}\\
...
...t}\left[\begin{array}{cc}{1}&{0}\\
{t}&{1}\end{array}\right]
\end{displaymath}](img559.png)
![\begin{displaymath}
X(t)=e^{\lambda\,t}\,B^{-1}\;\left[\begin{array}{cc}{1}&{0}\\
{t}&{1}\end{array}\right]\,B\, X_0
\end{displaymath}](img560.png)
Questa formula è più semplice da esaminare dal punto di
vista qualitativo, ma in pratica è più complicata da usare di
quella precedente, in cui l'esponenziale di ![]() era calcolata senza
passare dalla forma canonica. Infatti per calcolare la matrice
era calcolata senza
passare dalla forma canonica. Infatti per calcolare la matrice ![]() occorre: scegliere un vettore
occorre: scegliere un vettore ![]() ; calcolare
; calcolare ![]() ;
verificare che è diverso da
;
verificare che è diverso da ![]() ; formare la matrice
; formare la matrice
![]() ; invertirla per trovare
; invertirla per trovare ![]() ; eseguire le
moltiplicazioni di matrici del coniugio con
; eseguire le
moltiplicazioni di matrici del coniugio con ![]() . Nella formula
precedente invece basta calcolare
. Nella formula
precedente invece basta calcolare
![]() .
.
Esercizio
Trovare tutte le possibili matrici nilpotenti ![]() .
.
Suggerimento: se l'equazione caratteristica deve essere
![]() , poiché i coefficienti dell'equazione caratteristica
sono meno la traccia ed il determinante
, poiché i coefficienti dell'equazione caratteristica
sono meno la traccia ed il determinante
![]() ,
da cui
,
da cui
![]() ; distinguendo i casi
; distinguendo i casi ![]() ed
ed ![]() ...
...
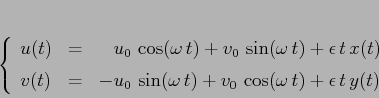
Il comportamento qualitativo delle orbite si può quindi studiare nel
caso del sistema in forma canonica, a cui ci si può ricondurre con un
cambiamento di coordinate lineare:
![\begin{displaymath}\left\{\begin{array}{lcl}
{\displaystyle x(t)} & {\display...
...isplaystyle e^{\lambda\,t}\,[y_0 +x_0\,t]}
\end{array}\right.
\end{displaymath}](img570.png)


Nei due casi con ![]() il comportamento qualitativo
attorno al punto di equilibrio si chiama
nodo improprio. Si noti la presenza di una
curva eccezionale che in questo caso è
il comportamento qualitativo
attorno al punto di equilibrio si chiama
nodo improprio. Si noti la presenza di una
curva eccezionale che in questo caso è ![]() .
.
Vogliamo ora delineare la procedura da usare per risolvere esplicitamente un sistema dinamico continuo lineare qualsiasi. Il procedimento più generale usa la decomposizione della matrice del sistema in somma di due matrici che commutano tra loro, e per ciascuna delle quali il calcolo dell'esponenziale è elementare.
Consideriamo il più generale sistema dinamico
lineare:
Per ogni matrice ![]() di tipo
di tipo ![]() , tutte le orbite del
sistema dinamico continuo lineare
, tutte le orbite del
sistema dinamico continuo lineare ![]() sono esprimibili
mediante combinazioni lineari di funzioni del tipo:
sono esprimibili
mediante combinazioni lineari di funzioni del tipo:
In realtà sia la decomposizione ![]() , sia la forma canonica
della matrice semisemplice
, sia la forma canonica
della matrice semisemplice ![]() sono disponibili solo a condizione di
conoscere tutti gli autovalori di
sono disponibili solo a condizione di
conoscere tutti gli autovalori di ![]() , il che non è affatto ovvio
dal punto di vista computazionale.
, il che non è affatto ovvio
dal punto di vista computazionale.
Eseguendo la moltiplicazione di matrici
![]() si
trovano le combinazioni lineari delle funzioni descritte
nell'enunciato del teorema.
si
trovano le combinazioni lineari delle funzioni descritte
nell'enunciato del teorema.
Resta da spiegare perché i polinomi che moltiplicano
![]() (oppure
(oppure
![]() ,
,
![]() ) hanno grado non superiore alla
molteplicità dell'autovalore meno uno, benché appaiano nel
polinomio
) hanno grado non superiore alla
molteplicità dell'autovalore meno uno, benché appaiano nel
polinomio ![]() che ha un grado
che ha un grado ![]() che potrebbe essere
superiore. La dimostrazione di quest'ultimo punto richiederebbe una
discussione un po' più approfondita dei requisiti di algebra (vedi
Sezione A.1). Perciò la rimandiamo alla
seguente discussione sulle forme canoniche di Jordan.
che potrebbe essere
superiore. La dimostrazione di quest'ultimo punto richiederebbe una
discussione un po' più approfondita dei requisiti di algebra (vedi
Sezione A.1). Perciò la rimandiamo alla
seguente discussione sulle forme canoniche di Jordan.
Una descrizione più esplicita
del flusso integrale di un sistema dinamico lineare generale può
essere ottenuta utilizzando la forma canonica di Jordan e la
forma canonica di Jordan reale. Se la matrice ![]() ha solo
autovalori reali, esiste un cambiamento di coordinate lineare
ha solo
autovalori reali, esiste un cambiamento di coordinate lineare
![]() tale che:
tale che:
Questo completa la dimostrazione del teorema delle
soluzioni del sistema dinamico lineare nel caso di
autovalori reali, perché il nilpotente ![]() ha ordine
ha ordine ![]() ,
quindi la corrispondente esponenziale viene moltiplicata per un
polinomio di grado non superiore a
,
quindi la corrispondente esponenziale viene moltiplicata per un
polinomio di grado non superiore a ![]() .
.
Si può scegliere la nuova base, cioè la matrice ![]() ,
in modo tale che ciascuno dei nilpotenti
,
in modo tale che ciascuno dei nilpotenti ![]() abbia la
forma canonica dei nilpotenti (si vedano gli esempi
nella Sezione 2.5); allora la matrice trasformata
abbia la
forma canonica dei nilpotenti (si vedano gli esempi
nella Sezione 2.5); allora la matrice trasformata ![]() sarà diagonale a blocchi, con un certo numero di
blocchi di Jordan per ogni autovalore
distinto:
sarà diagonale a blocchi, con un certo numero di
blocchi di Jordan per ogni autovalore
distinto:
![\begin{displaymath}
Q=diag\,[Q_1,\ldots, Q_s]\hspace{5mm},\hspace{5mm}
Q_j=\lef...
...&\ddots & \vdots \cr
0 & 0 & 0& \ldots & \lambda_k
}\right]
\end{displaymath}](img607.png)
![\begin{displaymath}
\exp(Q_j\,t)=e^{\lambda_k\,t}\;\left[\matrix{
1 & 0 & 0 & \...
...(p-1)! &t^{p-2}/(p-2)! & t^{p-3}/(p-3)! & \ldots & 1
}\right]
\end{displaymath}](img610.png)
Per completare la dimostrazione del teorema
delle soluzioni del sistema dinamico lineare occorre considerare
che i blocchi di Jordan reali associati agli autovalori
![]() non possono essere più grandi di
non possono essere più grandi di ![]() se
se ![]() è la
molteplicità algebrica
della coppia di autovalori.
è la
molteplicità algebrica
della coppia di autovalori.
Esercizio
Determinare esplicitamente il flusso integrale del sistema dinamico
![\begin{displaymath}
\left\{\begin{array}{lcl}
{\displaystyle \frac{d\,X}{dt}} &...
...-1&0&2\\
6&6&2&-6\\
-3&-2&1&3\\
1&1&1&1
\end{array}\right ]
\end{displaymath}](img618.png)
Suggerimento: La matrice data ha un solo autovalore.
Vogliamo discutere un esempio di sistema dinamico lineare con una matrice ad autovalori non reali e non semisemplice. Questo è il più semplice esempio di sistema dinamico che presenta una risonanza, cioè un effetto di amplificazione dovuto all'eguaglianza di due frequenze.
Consideriamo il sistema dinamico lineare in ![]() :
:
![\begin{displaymath}
\left[\begin{array}{c}
{\dot x}\\ {\dot y}\\ {\dot u}\\ {\...
...ft[\begin{array}{c}{x}\\ {y}\\ {u}\\ {v}\end{array}\right]\ ,
\end{displaymath}](img621.png)
Per poter usare il teorema della somma degli
esponenti bisogna verificare che ![]() ; non è detto che sia
così per ogni modo di scomporre la matrice in semisemplice
più nilpotente, ma in questo caso è vero.
; non è detto che sia
così per ogni modo di scomporre la matrice in semisemplice
più nilpotente, ma in questo caso è vero.
Allora l'orbita con condizione iniziale
![]() è:
è:
![\begin{displaymath}
\left[\begin{array}{c}{x(t)}\\ {y(t)}\\ {u(t)}\\ {v(t)}\end...
...egin{array}{c}{x_0}\\ {y_0}\\ {u_0}\\ {v_0}\end{array}\right]
\end{displaymath}](img633.png)